-
Osnovna sestava industrijskih robotov
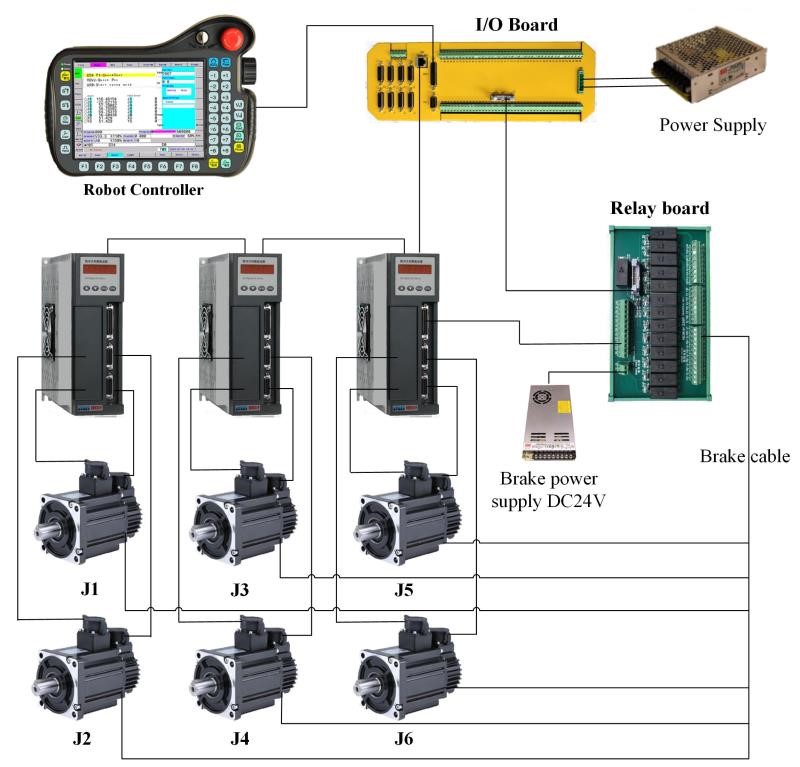
Z vidika arhitekture lahko robota razdelimo na tri dele in šest sistemov, od katerih so trije deli: mehanski del (uporablja se za izvajanje različnih dejanj), senzorski del (uporablja se za zaznavanje notranjih in zunanjih informacij), krmilni del (nadzor robota za dokončanje različnih ...Preberi več -
Strategija programiranja CNC obdelovalnih centrov
Za CNC obdelavo je zelo pomembno programiranje, ki neposredno vpliva na kakovost in učinkovitost obdelave. Kako torej hitro obvladati veščine programiranja CNC obdelovalnih centrov? Učimo se skupaj! Ukaz za premor, G04X(U)_/P_ se nanaša na čas premora orodja (ustavitev podajanja, vreteno ...Preberi več -

Sedem tehničnih poudarkov trenda razvoja CNC obdelovalnih strojev na Kitajskem.
Vidik 1: Sestavljeni obdelovalni stroji so v vzponu. Zahvaljujoč zmogljivim krmilnim zmožnostim vrhunskih CNC obdelovalnih strojev, vse bolj izpopolnjeni tehnologiji oblikovanja in izdelave ter vse bolj zreli aplikacijski tehnologiji, vključno s programiranjem, so sestavljena obdelovalna orodja s svojo močjo ...Preberi več






