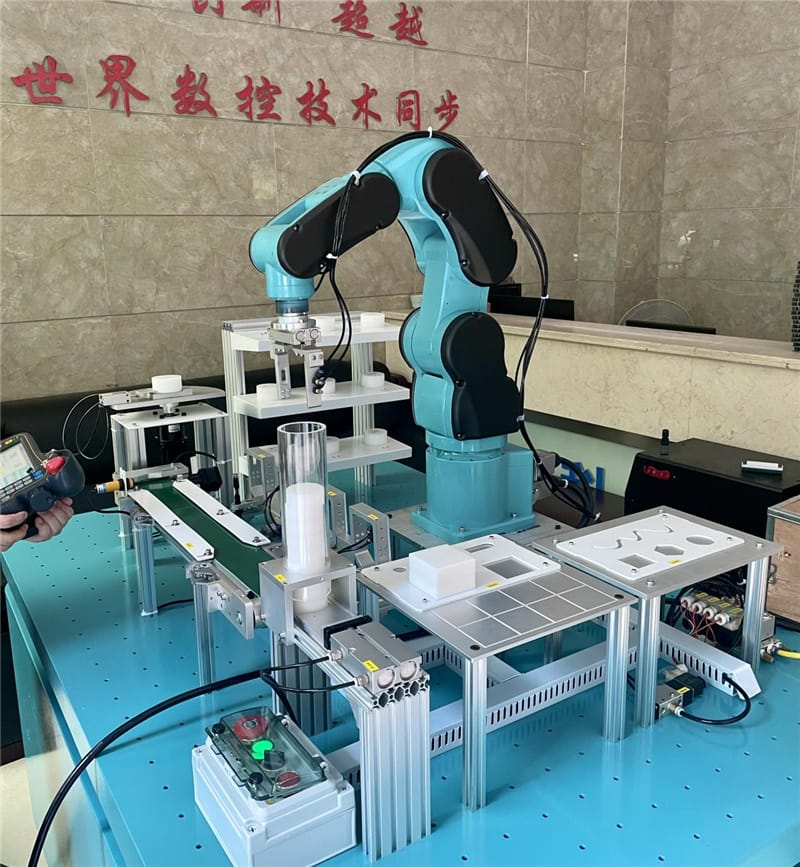




6-osna izobraževalna ali zgibna robotska roka Diy Delta ali robotska roka s kamero
Specifikacija
Os: 6
Največja nosilnost: 4 kg
Ponovljena lokacija: ±0,01 mm
uporaba vlažnost: 20-80%
žajbelj okolje: 0℃-45℃
Namestitev: tla
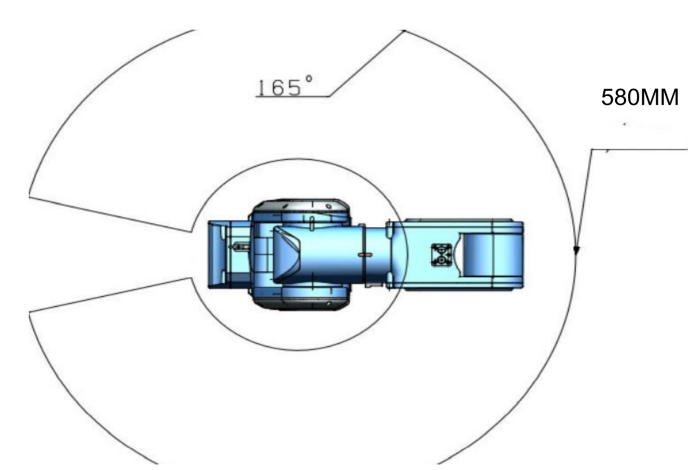
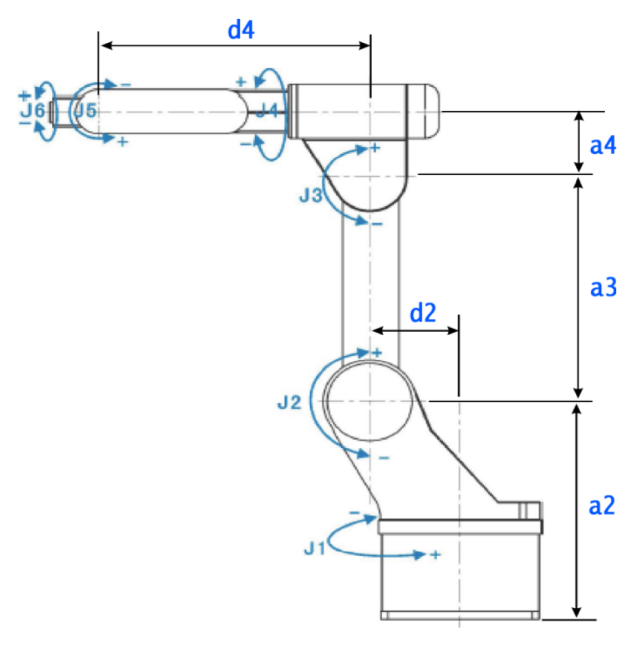
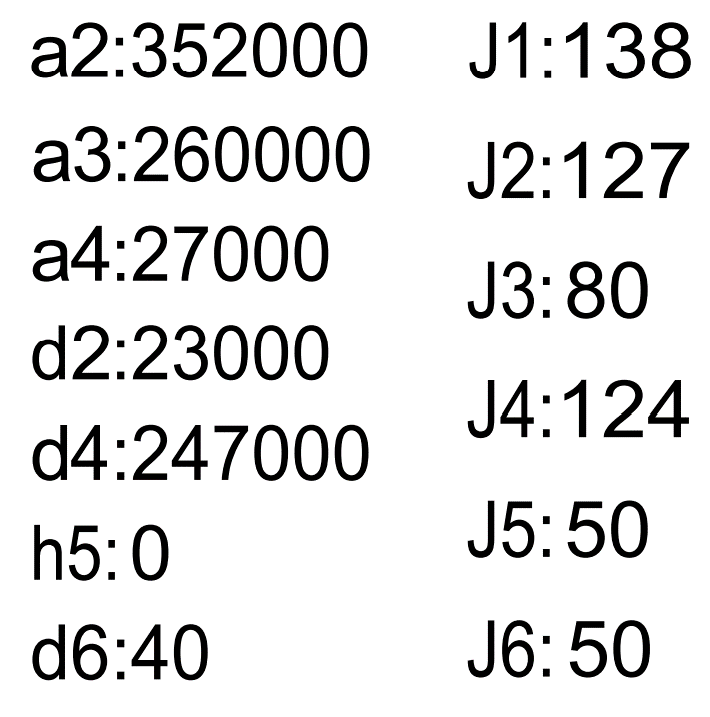
Delovno območje: J1:±165°
J2: -100°~+120°
J3: +150° ~-60°
J4: ±175°
J5: +130° ~-30°
J6: ±180°
Največja hitrost: J1: 260°/s
J2: 250°/s
J3: 250°/s
J4: 250°/s
J5: 200°/s
J6:760°/s
delovno območje:
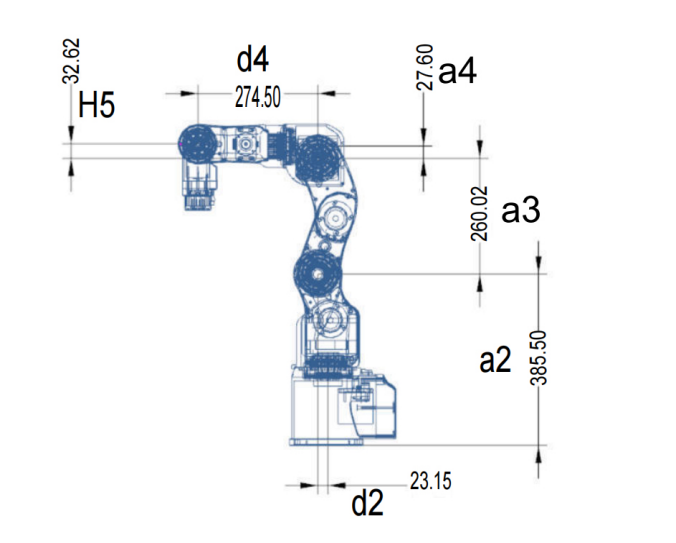
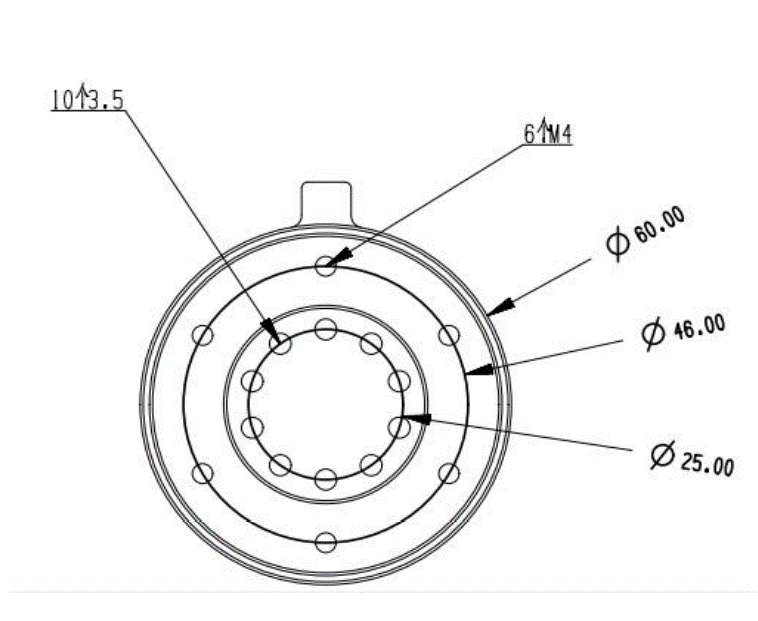
osnovna namestitev:
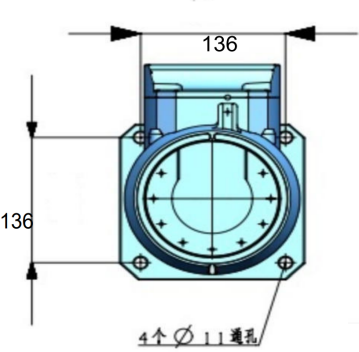
osnovna namestitev:
Aplikacije
Izobraževalne aplikacije:
1. Preučiti osnovno sestavo robotskega sistema.
2. Preučiti funkcije programiranja in poučevanja obeska za učenje robota.
3. Naučiti se osnovnih znanj programiranja robotov brez povezave.
4. Preučiti delovanje in programiranje aplikacij robota io.
5. Preučevanje robotskih vizualnih aplikacij
Komercialni prizori: Robot sladoled Robot natakar Robot kava Robot mleko čaj Prizori lahke industrije: Merjenje Točenje Pregled Sortiranje
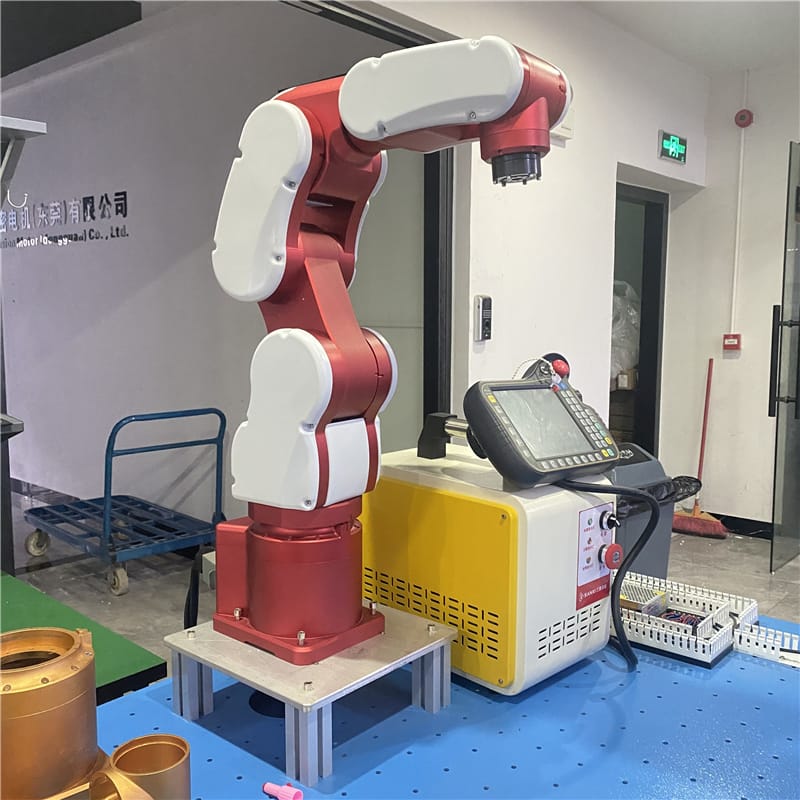
Lastnosti izdelka
Robotska roka: Robotska roka je izdelana iz aluminijastih odlitkov skozi CNC obdelovalni center, površina pa je poškropljena s plastiko in ima čudovit videz.
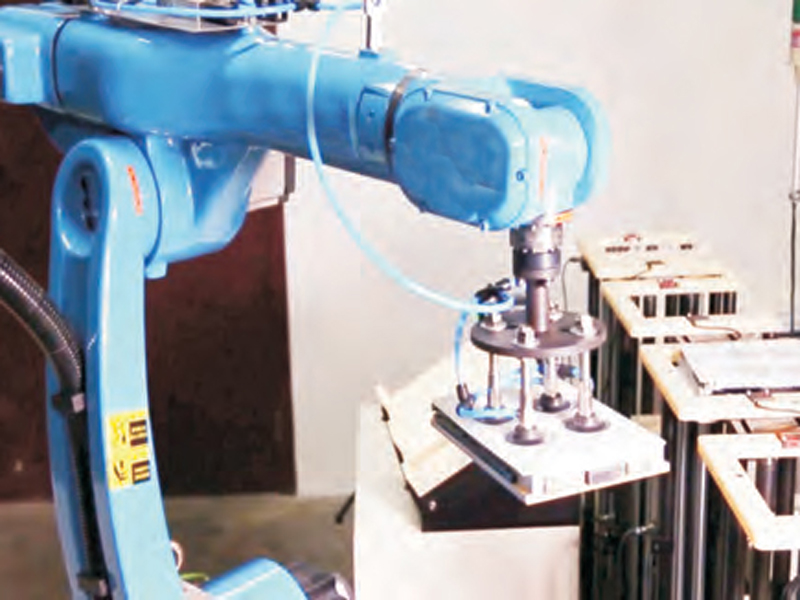
Rezervirana luknja za kabel: Robotova roka ima rezervirane luknje za kabel, ki so lepe in ne ovirajo delovanja manipulatorja. Konec traheje je rezerviran za vrata in konektor podatkovnega kabla.
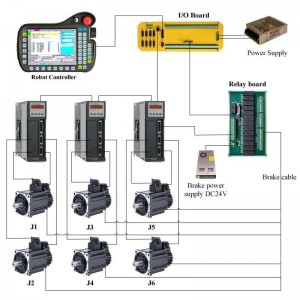
Krmilna plošča: LCD zaslon z velikim zaslonom, jezikovni način prikaza lahko temelji na potrebah strank, preprosto in jasno upravljanje in programiranje, s spletnim spreminjanjem parametrov in funkcijami samodiagnoze napak.
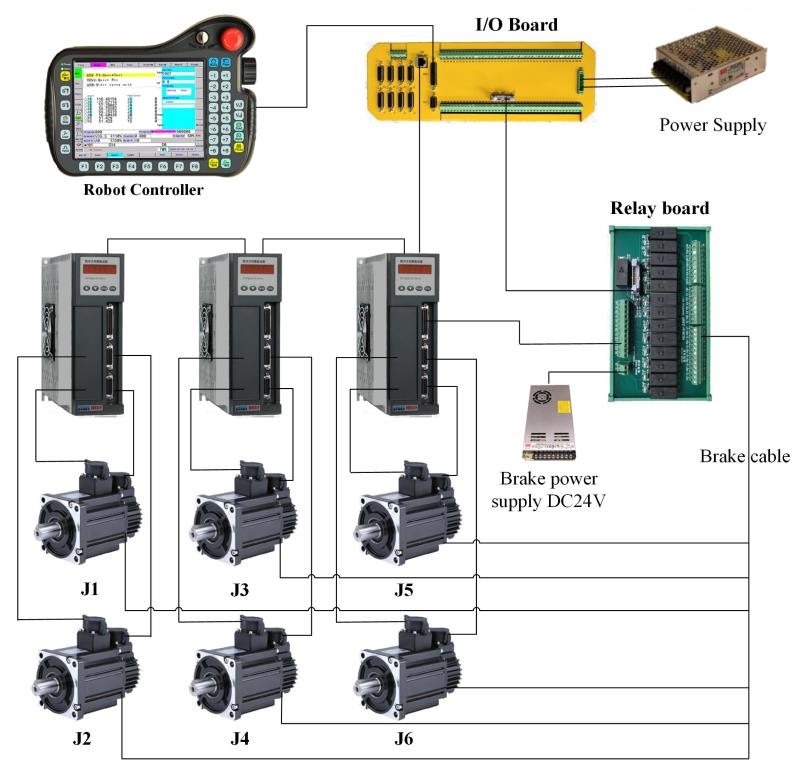
Krmilna omara robota: inteligentni sistem za nadzor gibanja uporablja industrijsko računalniško tehnologijo, popolnoma digitalni servo modul pa zagotavlja pogonsko moč za AC servo motorje vsakega sklepa robota.
Robotske napeljave: napeljava za orodje lahko izbere različno težo in količino glede na prilagojene zahteve in je nameščena na končni prirobnici, ki jo je enostavno nastaviti in ima širok spekter uporabe.